Iedereen heeft het erover. “We moeten even scannen.” Alsof het een knopje is: klik – model klaar.
Nou… mooi niet.
3D-scannen is geen Harry Potter-magie, geen “app op je iPhone” en zeker niet iets wat je ff erbij doet. Wat is het nou echt – en kun je het zelf of is het beter om het werk uit te besteden?
Is 3D-scan een oplossing voor jouw vraagstuk? Bij twijfel, bellen met 3D-scan noodnummer: 06 444 76 857
Karolina
3D-scannen in één zin
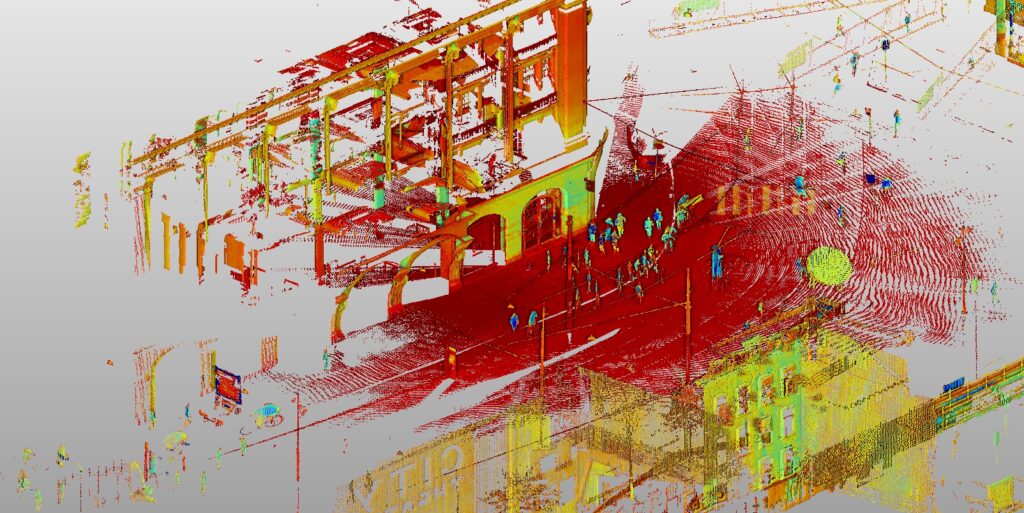
Je vangt miljoenen puntjes van de werkelijkheid en slaat ze op als een digitale kopie.
Elk punt heeft een exacte positie in de ruimte – x, y, z – en samen vormen ze een puntenwolk. Zo’n wolk is geen foto, geen tekening, maar pure geometrie: een 3D-handtekening van wat er écht is.
Of het nou gaat om een fabriekshal, kraanbaan, machinekamer of monumentaal pand – met 3D-scannen kun je alles in kaart brengen. En brengt je ook echt alles in beeld ook dingen die je niet hoeft of wil zien.
Hoe doe je dat?
Er zijn meerdere manieren om dat te doen. En ja, die hebben allemaal hun eigen “persoonlijkheid” (lees: hakken en oogen).
De belangrijkste 3D-scantechnieken
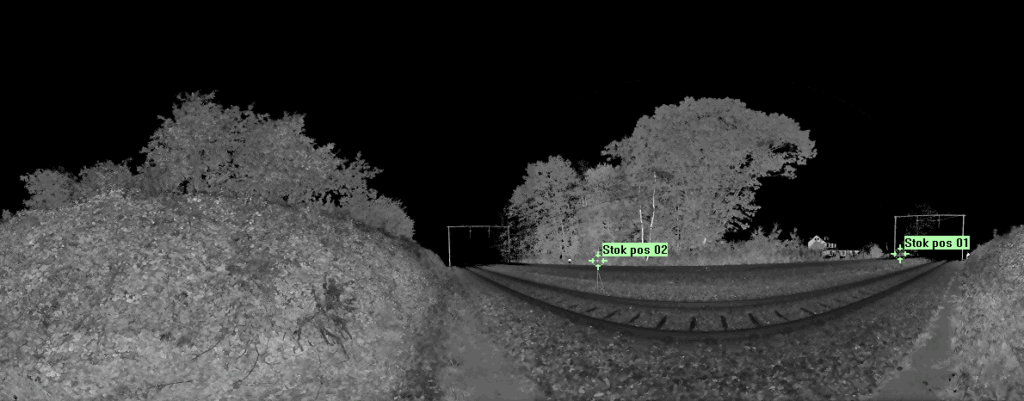
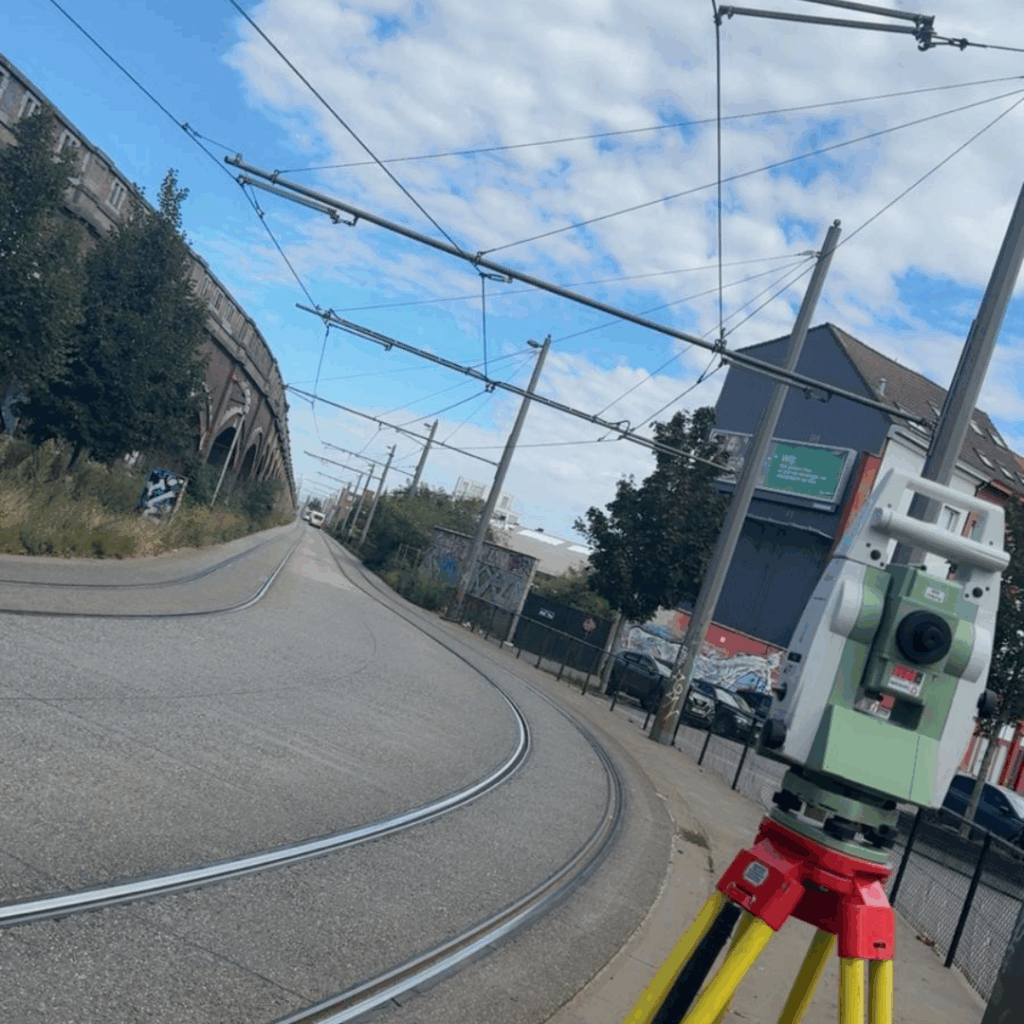
1. Laser scanning (LiDAR)
De klassieker. De scanner schiet lasers de wereld in en meet hoelang het duurt tot ze terugkomen. Zo weet hij exact hoe ver iets is – tot op een paar tienden van een millimeter.
Varianten:
Terrestrisch (TLS): op statief, voor gebouwen, hallen.
Mobiel (MLS): op trolley, auto of robot – handig als je 80 meter kraanbaan moet scannen.
Aerial (ALS): op drone of vliegtuig, voor dijken, havens en scheepswerven.
Kortom: het meetlint van licht.
Voordeel: snel, nauwkeurig, werkt buiten en binnen, ongeacht beschikbaar licht.
Nadeel: reflecties, glas, water of glimmende staaloppervlakken kunnen roet in het eten gooien.
2. Fotogrammetrie
Klinkt duur, is eigenlijk “3D uit foto’s”. Je maakt honderden foto’s vanuit verschillende hoeken. Software vergelijkt de overlap en berekent diepte.
Het resultaat? Een kleurig 3D-model. Mooi voor gevels, terrein en visualisaties — maar minder geschikt voor millimeterwerk.
Vergelijk het met puzzelen met 10.000 foto’s.
Voordeel: Goedkoper en visueel mooi.
Nadeel: Minder nauwkeurig; afhankelijk van licht, lens, en geduld.
3. Drone-scanning
De luchtmacht van het scannen. Een drone met LiDAR of fotocamera legt in één vlucht hele gebieden vast: havens, werven, grote bouwplaatsen.
Voordeel: snel veel data.
Nadeel: minder nauwkeurigheid op detailniveau, afhankelijk van vliegvergunningen.
4. Structured Light / White Light Scanning
Lichtpatronen worden op een object geprojecteerd, een camera meet hoe ze vervormen. Dat levert supernauwkeurige modellen op (submillimeter!).
Ideaal voor kleine onderdelen, scheepscomponenten of reverse engineering.
Voordeel: supernauwkeurig (sub-mm).
Nadeel: enkel in gecontroleerde binnenomgeving, geen zon of wind graag.
5. Handheld Scanning
Alsof je met een stofzuiger de werkelijkheid opzuigt. Je loopt rond met een draagbare scanner die zelf zijn positie bepaalt via sensoren (IMU) en lasers.
Handig in smalle machinekamers, trappenhuizen of onder dek.
Voordeel: mobiel, snel.
Nadeel: nauwkeurigheid varieert; kalibratie en workflow cruciaal.
6. Hydro-scanning (onder water)
Ja, zelfs wat we niet kunnen zien, kunnen we scannen. Met sonar of lasers meten we onder water de vorm van een scheepsromp, kade of dok.
Voordeel: data waar je ogen niets zien.
Nadeel: specialistisch, traag en afhankelijk van waterkwaliteit.
Waarom zou je überhaupt scannen?
Omdat “ongeveer” in de bouw, industrie en scheepvaart de duurste fout is die je kunt maken.
3D-scannen laat je:
zien wat er écht is, niet wat er op tekening staat.
clashes voorkomen vóórdat ze gebeuren.
prefab delen perfect laten passen.
onderhoud plannen met echte maatvoering, niet giswerk.
Wat gebeurt er na het scannen?
Een scan is pas het begin. Daarna volgt het modeleren, analyseren, registreren, combineren, coördineren – oftewel: het moment waarop de magie begint te lijken op werk.
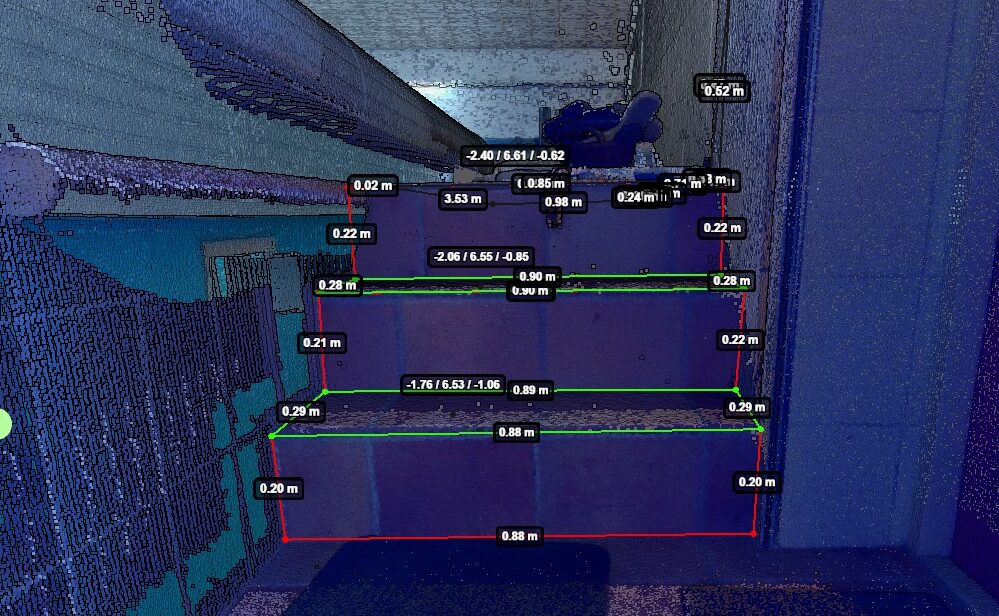
De ruwe puntenwolk wordt verwerkt tot een:
3D-model (BIM, CAD, Revit, SolidWorks, whatever your poison)
meetrapport (hoe recht, hoe krom, hoe scheef)
digitale twin (een virtuele kopie van je project voor beheer en onderhoud)
Maar let op…
Iedereen kan een scan maken. Niet iedereen weet wat hij scant, waarvoor en hoe nauwkeurig het moet zijn.
Dat is het verschil tussen een wolk vol data en een wolk vol ellende.
Samenvatting voor wie tot hier heeft gescrold
3D-scannen is:
het meten van de werkelijkheid met licht of geluid,
het vertalen naar bruikbare 3D-data,
en het verschil tussen gokken en weten.
Of, zoals wij het zeggen:
“We meten niet omdat het moet. We meten omdat het anders misgaat.”
De toekomst van 3D-scannen is slim. AI die automatisch buizen, muren of leidingen herkent. Modellen die direct koppelen aan onderhoudsplannen. En scanners die kleiner, sneller, en bijna net zo eigenwijs zijn als hun operator.
Maar wat hetzelfde blijft? Dat je het beter laat doen door mensen die weten wat ze doen – met geduld, koffie, en een lichte neiging tot perfectionisme.
Om de beste ervaringen te bieden, gebruiken wij technologieën zoals cookies om informatie over je apparaat op te slaan en/of te raadplegen. Door in te stemmen met deze technologieën kunnen wij gegevens zoals surfgedrag of unieke ID's op deze site verwerken. Als je geen toestemming geeft of uw toestemming intrekt, kan dit een nadelige invloed hebben op bepaalde functies en mogelijkheden.
Functioneel
Altijd actief
De technische opslag of toegang is strikt noodzakelijk voor het legitieme doel het gebruik mogelijk te maken van een specifieke dienst waarom de abonnee of gebruiker uitdrukkelijk heeft gevraagd, of met als enig doel de uitvoering van de transmissie van een communicatie over een elektronisch communicatienetwerk.
Voorkeuren
De technische opslag of toegang is noodzakelijk voor het legitieme doel voorkeuren op te slaan die niet door de abonnee of gebruiker zijn aangevraagd.
Statistieken
De technische opslag of toegang die uitsluitend voor statistische doeleinden wordt gebruikt.De technische opslag of toegang die uitsluitend wordt gebruikt voor anonieme statistische doeleinden. Zonder dagvaarding, vrijwillige naleving door uw Internet Service Provider, of aanvullende gegevens van een derde partij, kan informatie die alleen voor dit doel wordt opgeslagen of opgehaald gewoonlijk niet worden gebruikt om je te identificeren.
Marketing
De technische opslag of toegang is nodig om gebruikersprofielen op te stellen voor het verzenden van reclame, of om de gebruiker op een website of over verschillende websites te volgen voor soortgelijke marketingdoeleinden.